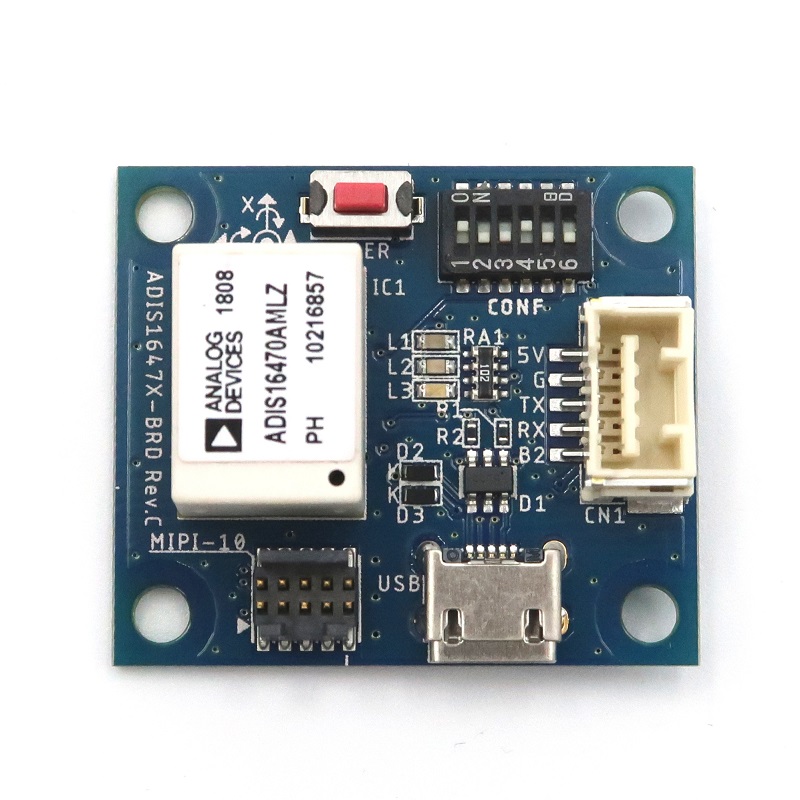
ADIS16470搭載IMUボード /
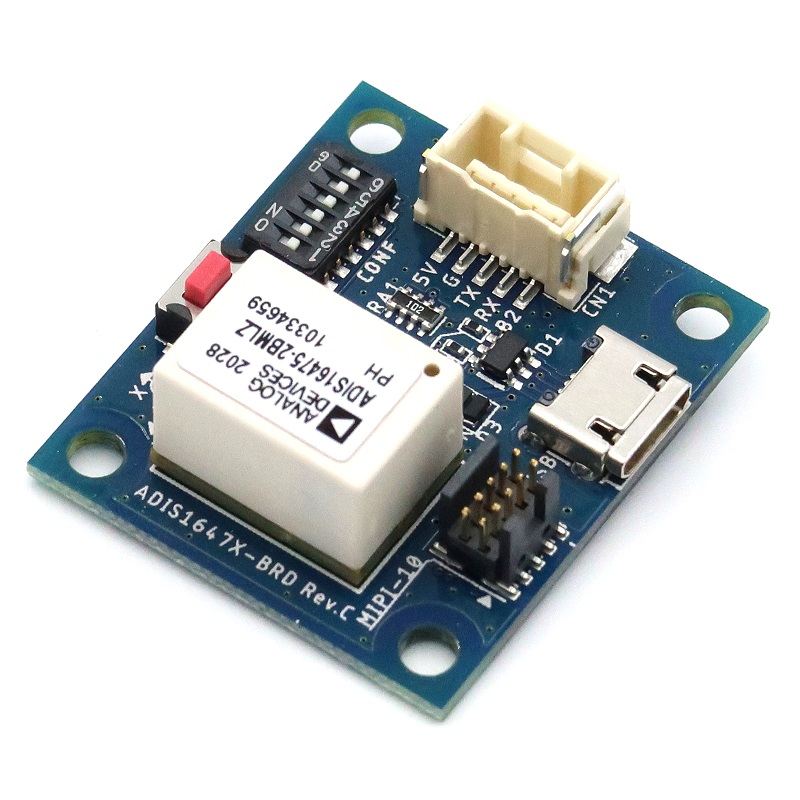
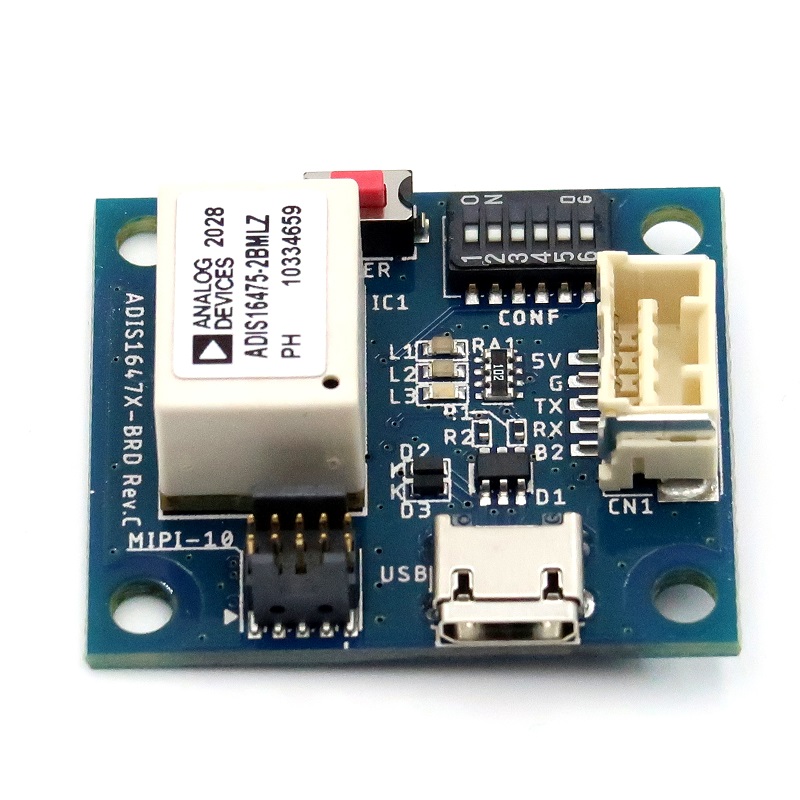
ADIS16475-2搭載IMUボード

アナログ・デバイセズ社製の高性能IMU ADIS-16470(or ADIS 16475-2)と、STマイクロ社製の小型マイコン(STM32F070)を1枚の小型基板に納めました。オンボードで高精度な姿勢角の推定が可能です。USB接続でPCと接続でき、簡単にROS1 or ROS2で使用することができます。ROS関連のソース、マイコンのファームウェア、Windows(C#)用のサンプルソースなどをgithubにて公開しています。
用途は、試作開発用のロボットの姿勢角推定、振動データのロギング、等を想定しています。
製品の特長
高性能IMU搭載
アナログ・デバイセズ社製高性能IMU ADIS-16470(or ADIS 16475-2)を搭載しています。アナデバの工場出荷時にそれぞれの、バイアス、感度、Cross-axis、温度特性、等の補正が行われています。デジタルフィルタも内蔵。
オンボードで姿勢角推定が可能
マイコン(STM32-F0)が搭載されているため、本ボード上で絶対角の推定演算が可能です。推定アルゴリズムは、東工大舛屋先生にご協力いただいたものです。(注)高精度IMUを使用しているのでヨー軸のドリフトは大変少ないですが、原理的に長期間でみるとヨー軸のドリフトは生じますので、ユーザー側で適当なタイミングでドリフト補正する必要があります。
ROS1/ROS2対応
ROS1とROS2それぞれに対応したドライバやサンプルを、githubに公開しています。接続して、すぐにrviz等で姿勢角の推定結果などを確認することが可能です。
Windows用サンプル
本ボードと通信して角度等を表示するWindows用のサンプル(WinForm, C#)をgithubに公開しています。
様々な出力モード
様々な出力モード(ジャイロ・加速度の生データ、姿勢推定角データ、等)を有します。DIPスイッチで切り替えられます。
マイコンのソースコードを公開
マイコンのソースコードをgithubに公開しています。開発環境はST Micro社のCubeMX(HAL)及びTruestudioとなっています(どちらも無料で入手可能)。
USB無しでも使用可
USB無しでも使用できるようになっています。外部電源&UART端子を使用することで、電源供給(5V)を外部から、通信はUART(3.3V系)で可能です。
地磁気センサを不使用
地磁気を使うと方位角(ヨー軸)のドリフトが安定しますが、地磁気は屋内等で安定しないことが多く、実験室では動いていたが、現場では動かないといったトラブルが多いです。本製品では高精度IMUを採用し、地磁気を使用しないという方針としています。
小型
外形寸法(WxHxD)が、35.0mm x 14.3mm x 30.0mmとコンパクト。
デバッグ機能
USBコネクタ以外に、LEDx3個、DIPスイッチx6個、外部電源&UART端子、SWD端子を実装しています。
資料
マニュアル
- 動作確認マニュアル(第2版:2023年05月08 日)
- ハードウェアマニュアル(初版)
- アプリケーションマニュアル(第2版:2023年05月08 日)
- ソフトウェア開発マニュアル(第2版:2023年05月08 日)
- ファームウェアアップデートマニュアル(第2版:2023年05月08 日)
ソースコード(GitHub)
- マイコンファームウェア:TR-IMU1647X
- Windows用C#サンプル:IMU_PlatformTool
- ROS1用ドライバ・サンプル:ADI_IMU_TR_Driver_ROS1
- ROS2用ドライバ・サンプル:ADI_IMU_TR_Driver_ROS2
ギャラリー
ADIS16470搭載IMUボード
|
|

|
|

梱包物 |
ADIS16475-2搭載IMUボード
|
|

|

梱包物 |
仕様
主要諸元
ADIS16470搭載IMUボード
| 項目 | 仕様 | |
|---|---|---|
| 製品名 | ADIS16470搭載IMUボード | |
| 型番 | TR-IMU16470 | |
| IMUセンサ | 型番 | アナログ・デバイセズ製 ADIS16470/AMLZ |
| ジャイロセンサ | レンジ:±2000 °/sec 動作中のバイアス安定度: 8 °/hr 速度ノイズ密度: 0.008 °/sec/√Hz |
|
| 加速度センサ | レンジ:±40 g 動作中のバイアス安定度:13 μg |
|
| 制御用マイコン | Cortex M0(STM32F070, 48MHz) | |
| USB | USB2.0 (micro Bコネクタ) | |
| その他I/O | LEDx3個、DIPスイッチx6個 SWD端子、 外部電源&UART端子 (外部電源は5V, UARTは3.3V系) |
|
| 電源入力 | USBコネクタ または 外部電源&UART端子 | |
| 動作温度範囲 | 0℃~50℃ | |
| 外形寸法 WxHxD | 35.0mm x 14.3mm x 30.0mm | |
| (参考) サンプルプログラムの データ通信周期 |
10msec (サンプルプログラムを実行した場合) |
|
| 用途 | 研究・試作用。 医療・航空・宇宙用に使用しないこと。 |
|
ADIS16475-2搭載IMUボード
| 項目 | 仕様 | |
|---|---|---|
| 製品名 | ADIS16475-2搭載IMUボード | |
| 型番 | TR-IMU16475-2 | |
| IMUセンサ | 型番 | アナログ・デバイセズ製 ADIS16475-2BMLZ |
| ジャイロセンサ | レンジ:±125°/sec, ±500°/sec, ±2000°/sec 角度ランダム・ウォーク: 0.15 °/√hr 軸間ミスアライメント誤差: ±0.1 ° |
|
| 加速度センサ | レンジ:±8 g 動作中のバイアス安定度:3.6 μg |
|
「制御用マイコン」以下の諸元は「ADIS16470搭載IMUボード」の表に同じ |
||
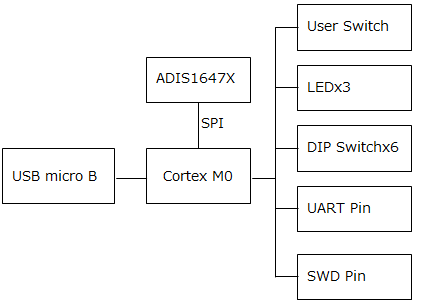
機能ブロック図
外形図
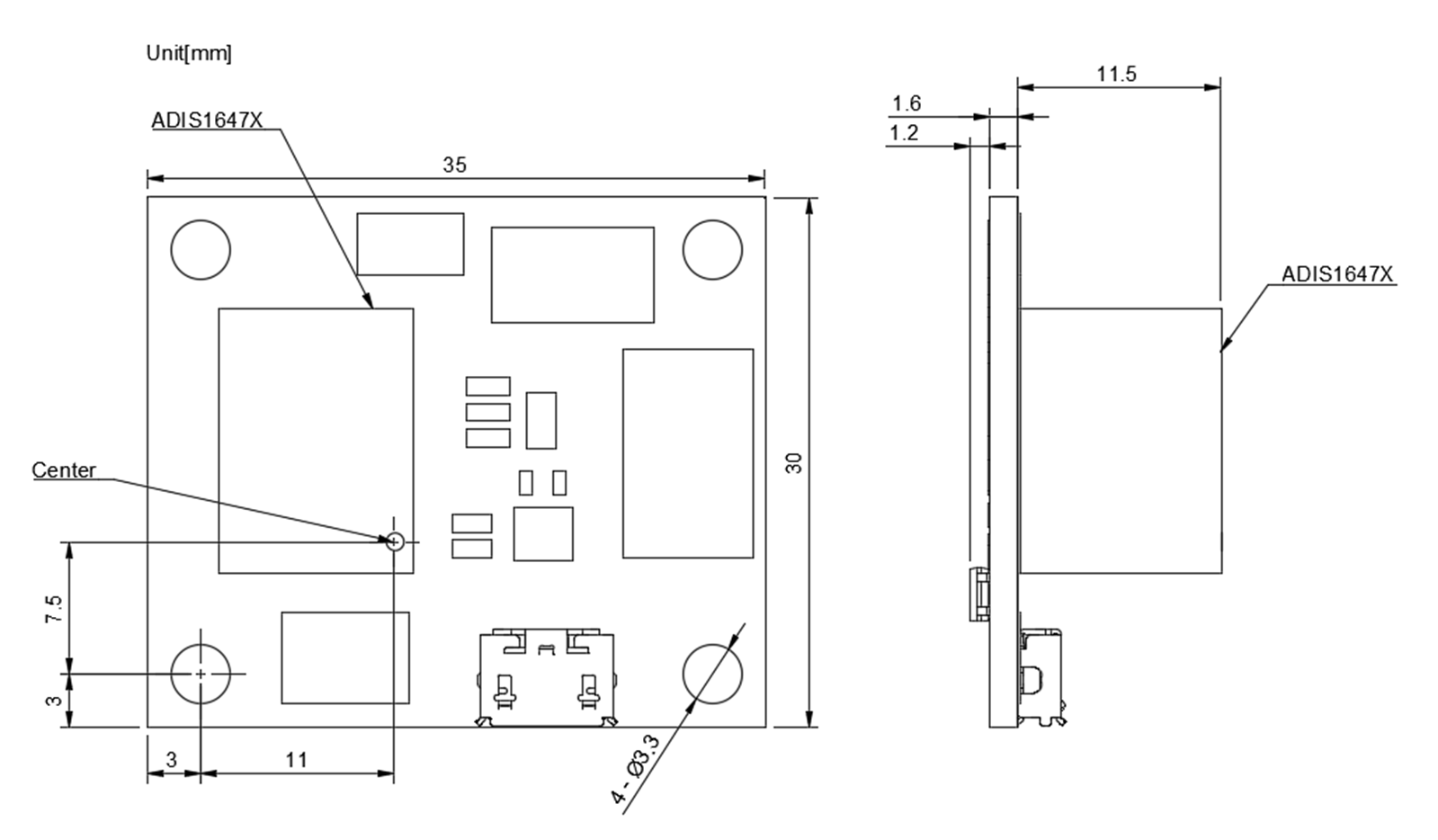
Clickで拡大
FAQ
ADIS16470搭載IMUボードとADIS IMU Platformの違いは
前者は、高精度IMUをすぐに使用したい場合、 コンパクトなためロボットへの搭載面積が限られている場合等に向いています。
後者は、オンボード上でより高速に高精度に演算をしたい場合。より高精度なADIS-16495などを使用したい場合に向いています。IMU自体が別売りですのでご注意ください。
ファームウェアのアップデート方法を教えてください
詳細は「ファームウェアアップデートマニュアル」を参照ください。
USBケーブルから書き込む方法(DFU)または、SWD端子からSTLINK V2等を使って書き込む方法があります。後者の場合、STLINK V2等とMIPI-10変換コネクタをお客様でご用意頂く必要があります。
ヨー軸のドリフトとは?
物体の回転方向は3軸あり、ロール、ピッチ、ヨー軸と呼ばれます。定義はwikipediaを参照。
移動台車では、ロール軸とピッチ軸はそれぞれ傾き角となり、ヨー軸は旋廻軸となります。
IMUで傾き角(ロール軸、ピッチ軸)を推定する場合、静的には重力加速度から求めることができます。傾きが0であれば重力加速度も0G,傾きが90度であれば重力加速度は1Gという具合です。
一方、IMUで旋廻軸(ヨー軸)を推定する場合、重力の影響が無いため、角速度の積分に頼ることになります。積分するため、特に角速度センサは温度によって変化するオフセット的なノイズがあるため、積分するとドリフトが生じることが課題となっています。
今回使用するIMUセンサは高精度であり、またアナデバの工場出荷時に校正されているため、このドリフト量が少なく、比較的安定してヨー軸の姿勢角も推定できることが特徴です。
しかし、原理的にどうしてもドリフトが生じてしまうので、定期的(例えば10分毎)に他のセンサを用いてドリフトを補正する必要があります。
なお、地磁気を用いて補正する方法もありますが、特に屋内等では地磁気が安定しないため、どこでも使用できるわけではないのでご注意ください。
ご購入方法
当社WebShopよりご購入ください。請求書払いなどのお支払い方法や、代理店のご紹介も可能です。