テクノロードは、ロボットの受託開発を承っています。
ロボットを開発するには、制御、電気回路、通信、ソフトウェア、機械等様々な技術が必要となります。 テクノロードでは、これらを一貫してワンストップで開発できることを強みとしています。
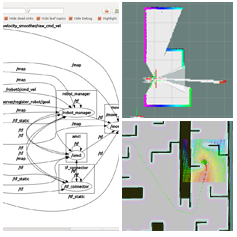
近年は、ROSを使った自律移動型ロボットの開発で、ハードからソフトまでトータルでお手伝いさせて頂くことが多いです。
ワンストップで開発します。
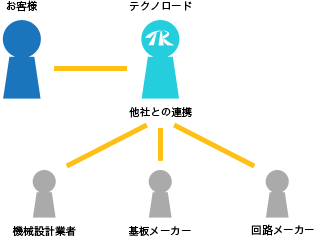
複雑なロボットは近郊の企業と協力して開発することもあります。その際、開発に必要な複数のベンダとの調整もすべて弊社で行います。お客様はベンダとの調整に煩わされることはございません。 概略仕様をお伝え頂ければ、あとはこちらから開発方法についてご提案致しますので、お気軽にご相談下さい。
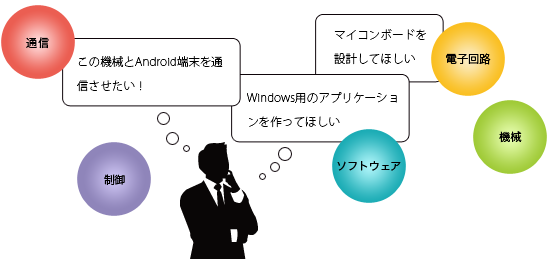
単体の技術を用いた開発もお受けしています。
総合的な開発のみでなく、お客様のご要望に合わせて、単体の技術を用いた開発もお受けしています。
※ 研究開発フェーズでのお手伝いを得意としています。
開発の流れ
まずはお気軽にお問合せ下さい
ご依頼
お客様からのご要望をお伺い致します
ご提案
ご依頼内容を元に仕様の検討、提案を致します
お見積り
弊社より開発に必要な費用を提示致します
納品
仕様の項目を達成出来ているか確認頂きます
開発
弊社で製品開発を開始します。適宜中間報告を致します
ご発注
お見積り内容をご確認の上お客様よりご発注を承ります
開発領域
制御系設計
- ROSを活用した自律移動型ロボットの設計
- 自律移動型ロボットの電気、機械、各種マイコンを一括で対応
- クラウド(Azure)と連携するロボット開発
- ブラウザと連携するロボット
- Androidアプリと連携するロボット
- Windows用ロボットのインタフェースソフト
- コミュニケーションロボット
- ロボットアーム
- 画像処理(OpenCV)
- 衛星搭載機器の制御系サブシステム設計
- 衛星搭載機器のモータ制御ファームウェア開発
- 地上試験用の月面ローバー制御システム開発
- 地上局用の小型衛星追尾システム開発
- 物理演算シミュレーション
電子回路開発
- システム提案、基板設計、ファーム開発、上位アプリ開発等、ワンストップで対応
- ST Micro製のM0,M3,M4,M7マイコン等が多い。その他も対応
- よく使用する機能:A/D, DIO, USB, UART, SPI, I2C, CAN, SD, EEPROM, 内蔵Flash
- モータモジュール:ステップ、ブラシレス、ブラシ付き、VCM
- 通信モジュール:Wi-Fi, Bluetooth, Zigbee, Ethernet
開発言語
- ROS:C/C++, Python, etc
- Windowsアプリ:C#, C++, C
- マイコンファーム:C
- ブラウザ系:HTML/Javascript, C#
- クラウド系(Azure):C#, Javascript, Python, PHP
- 3D描画(Open GL):C++, C#
- Androidアプリ:Java
- Matlab/Simulink
- その他
受託開発の実例
アイコン


コーヒーを淹れるロボット
アームロボットSawyerを使用。行動制御、ユーザアプリ、カップ置き判定、及び全体の管理ソフトを担当。
人工衛星搭載機器の制御
メカトロ系のシステム設計や制御ファームウェア開発

ロボットハンド
ハンドの設計(3D Printer)。多軸モーター制御。
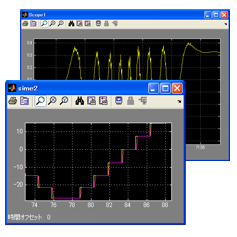
制御系設計
Matlab/Simulinkを使用した制御系設計
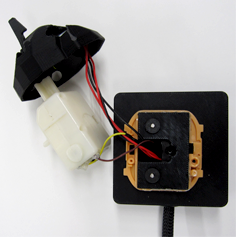
玩具の改造
市販の玩具を改造してロボット機能を追加
Androidアプリ
着せ替えホームアプリ、治具アプリ etc…
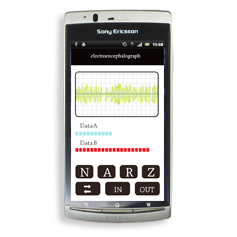
Android端末とのBT接続
PCのソフトをAndroidに移植し、センサーの波形をリアルタイムでAndroidに表示可能にした。

PC用簡易プリンタとAndroid端末とのBT接続
USBホスト機能付マイコン+BlueToothモジュールを製作し、 AndroidとのBlueTooth通信制御を可能とした。
モータドライバ
多軸同期ステップモータドライバ
ロボット開発・製品導入に関するご相談を承っております
構想段階からのご相談やお見積りのご依頼もお気軽にお問い合わせください