ADIS IMU Platform
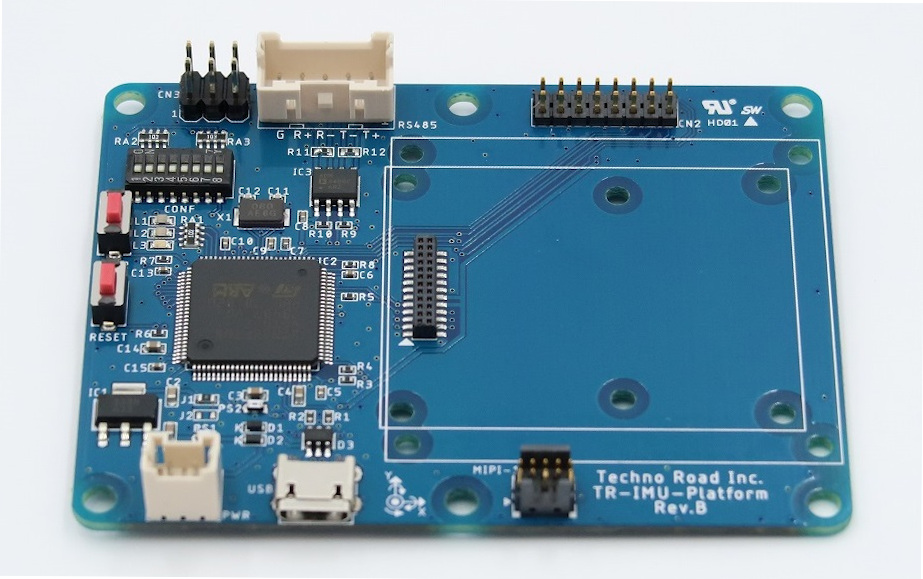
本マイコンボード「ADIS IMU Platform」(以下「Platform基板」と書きます)は、アナログ・デバイセズ社製の高性能IMUを搭載可能なマイコンボードです。
同社のIMU(ADIS164xxシリーズ及び評価基板)は、通信インタフェースがSPIであるため別途マイコン等が必要です。さらにこのマイコン上で信号処理演算を行いたいといった要求もあると思います。
それらの要望を解決するため、本マイコンボードは、ADIS164xxシリーズ及び評価基板を搭載することができ、さらにマイコンには組み込み用途では上位レベルのCortex M7 (STM32F765)を採用し、倍精度浮動小数点演算(double型)をハードウェアで可能としています。オンボードでより高精度な姿勢角の推定などが可能です。
マイコンにはUSB(2.0; micro B)コネクタがあり、PCに接続したり、ROS1 or ROS2で活用することも可能です。ROS関連のソース、マイコンのファームウェア、Windows(C#)用のサンプルソースなどをgithubにて公開しています。
用途は、試作開発用のロボットの姿勢角推定、振動データのロギング、等を想定しています。
対応しているIMU製品はADIS16470、ADIS16475、ADIS16495で、別途お客様で調達頂く必要があります。
姿勢角推定を行った際のデモ動画です。推定された絶対姿勢角を、ROSでデータを取得して、rvizに表示しています。
こんな方におすすめ
- 高速・高精度な演算が必要な方 — Cortex M7(216MHz)を採用し、倍精度浮動小数点(double型)演算をハードウェアで処理できます。オンボードでの高精度な姿勢推定演算に向いています。
- より高精度なIMUを使いたい方 — ADIS16495・ADIS16475・ADIS16470 など複数のADIセンサに対応しています(IMU自体は別途調達が必要です)。
- Ethernet経由でデータを取得したい方 — オプションのEthernet拡張キットを使うことで、USBなしにネットワーク越しのデータ取得が可能になります。
- ROS開発者 — ROS1/ROS2対応のドライバをGitHubで公開しています。接続してすぐrviz等で姿勢角を確認できます。
製品の特長
高性能IMUの評価用マイコンボード
アナログ・デバイセズ社製高性能IMUを搭載可能です。工場出荷時に、バイアス、感度、Cross-axis、温度特性、等の補正が行われています。デジタルフィルタも内蔵。
搭載可能なアナログ・デバイセズ製IMUや評価ボードは、下記の通りです。
- ADIS16495
Mouserから購入する場合 → リンク - ADIS16475-2/PCBZ (要オプションパーツ)
Mouserから購入する場合 → リンク - ADIS16470/PCBZ (要オプションパーツ)
Mouserから購入する場合 → リンク
オンボードで姿勢角推定が可能
マイコン(STM32-F7)が搭載されているため、本ボード上で絶対角の推定演算が可能です。 推定アルゴリズムは、東工大舛屋先生にご協力いただいたものです。(注)高精度IMUを使用しているのでヨー軸のドリフトは大変少ないですが、原理的に長期間でみるとヨー軸のドリフトは生じますので、ユーザー側で適当なタイミングでドリフト補正する必要があります。
マイコンにCortexM7を使用
マイコンには組み込み用途では上位レベルのCortexM7 (STM32F765, 216MHz)を採用しています。倍精度浮動小数点(double型)演算をハードウェアで可能なマイコンのため、高速に演算を行うことが可能です。
ROS1/ROS2対応
ROS1とROS2それぞれに対応したドライバやサンプルを、githubに公開しています。接続して、すぐにrviz等で姿勢角の推定結果などを確認することが可能です。
Windows用サンプル
本ボードと通信して角度等を表示するWindows用のサンプル(WinForm, C#)をgithubに公開しています。
様々な出力モード
様々な出力モード(ジャイロ・加速度の生データ、姿勢推定角データ、等)を有します。DIPスイッチで切り替えられます。
マイコンのソースコードを公開
マイコンのソースコードをgithubに公開しています。開発環境はST Micro社のCubeMX(HAL)及びTruestudioとなっています(どちらも無料で入手可能)。
地磁気センサーを不使用
地磁気を使うと方位角(ヨー軸)のドリフトが安定しますが、地磁気は屋内等で安定しないことが多く、実験室では動いていたが、現場では動かないといったトラブルが多いです。本製品では高精度IMUを採用し、地磁気を使用しないという方針としています。
デバッグ機能
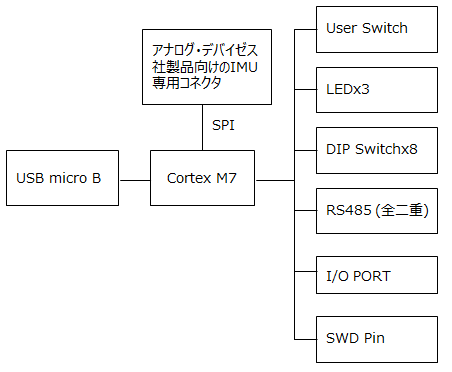
USBコネクタ以外に、LEDx3個、DIPスイッチx8個、RS485端子、I/O PORT、SWD端子を実装しています。
オプション部品
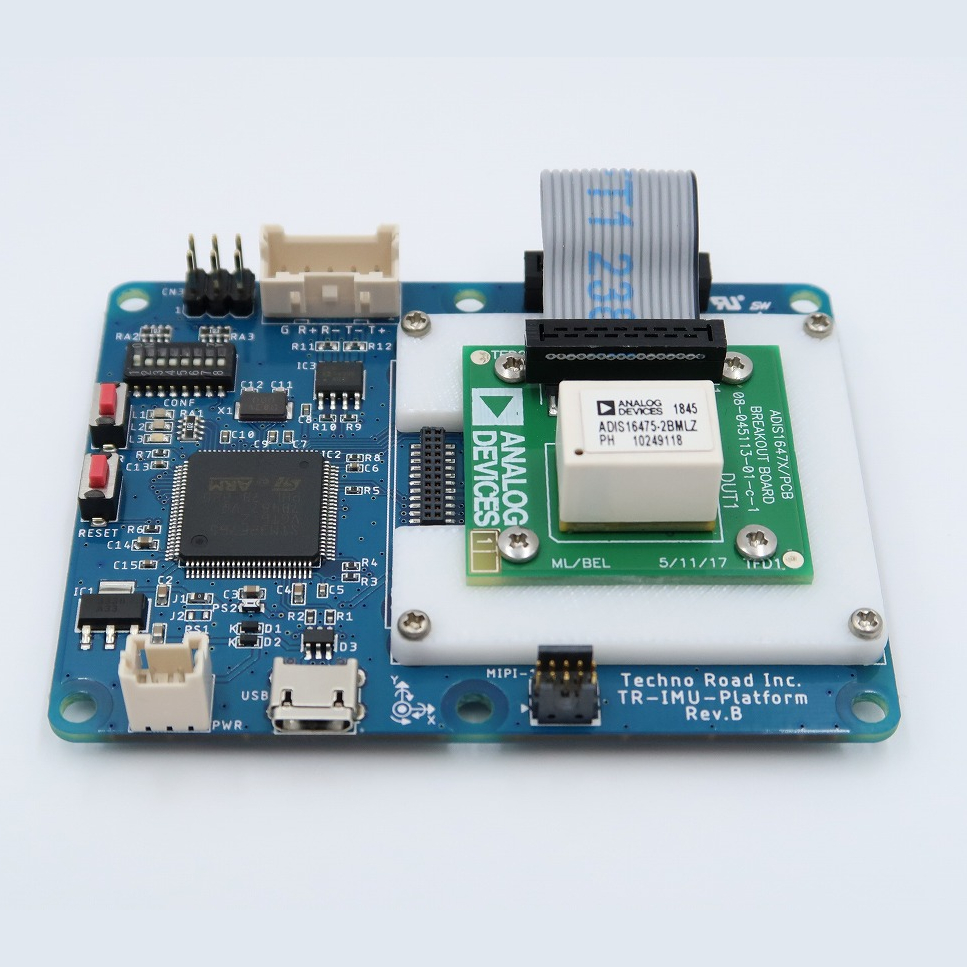
ADIS IMU Platform用 1647X搭載キット
Platform基板に、お客様で別途調達されたADIS16475-2/PCBZ や ADIS16470/PCBZ をそのまま搭載するためのオプションパーツです。
写真のような、アタッチメントプレート、ケーブル、ネジのセットです。なお、本Platform基板のマイコンファームウェアは、出荷時はADIS16495用のため、お客さまでマニュアルに従ってファームウェアを書き替えて頂く必要があります。
付属品:アタッチメントプレート、1647x接続用ケーブル、ネジ
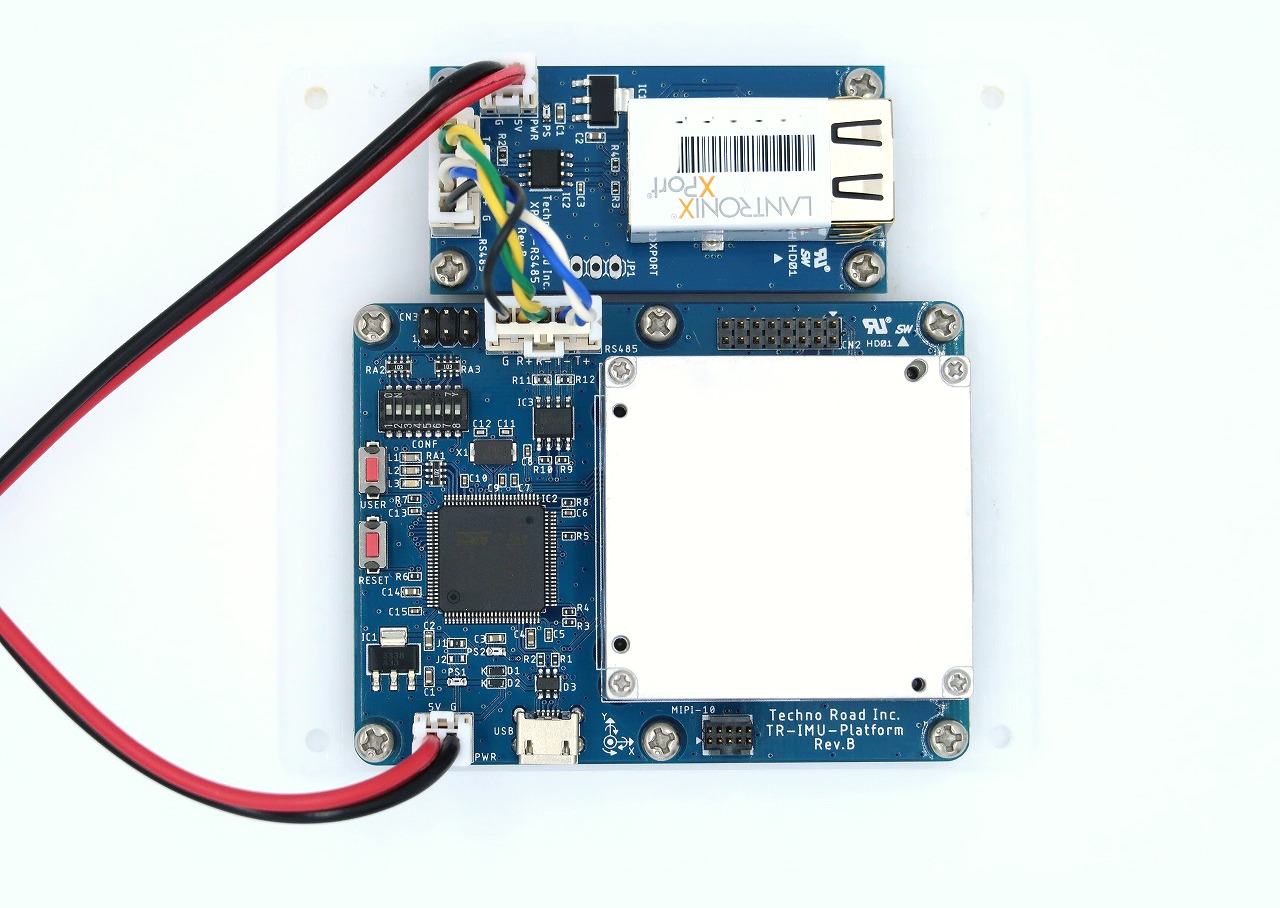
ADIS IMU Platform用 Ethernet拡張キット
Platform基板をEthernet通信可能とするためのオプションパーツです。EthernetのモジュールにLantronix社のXportを使用しています。
Platform基板とEthernet拡張キットはRS485を介して接続しています。USBを使用せずに電源供給ができるよう、ACアダプタ等も付属しています。
付属品:RS485接続用ケーブル、AC/DCアダプタ、電源分岐ケーブル、電源ケーブル

資料
マニュアル
- 動作確認マニュアル(第2版:2023年05月08 日)
- ハードウェアマニュアル(初版)
- アプリケーションマニュアル(第2版:2023年05月08 日)
- ソフトウェア開発マニュアル(第2版:2023年05月08 日)
- ファームウェアアップデートマニュアル(第2版:2023年05月08 日)
- ADIS1647X 取り付けマニュアル(初版)
- ADIS16495 取り付けマニュアル(初版)
- XPORT設定マニュアル(第2版:2023年05月08 日)
ソースコード(GitHub)
- マイコンファームウェア:TR_IMU_Platform
- Windows用C#サンプル:IMU_PlatformTool
- ROS1用ドライバ・サンプル:ADI_IMU_TR_Driver_ROS1
- ROS2用ドライバ・サンプル:ADI_IMU_TR_Driver_ROS2
仕様
主要諸元
ADIS IMU Platform
| 項目 | 仕様 | |
|---|---|---|
| 製品名 | ADIS IMU Platform | |
| 型番 | TR-IMU-Platform | |
| 対応IMUセンサ |
ADIS16475-2/PCB(要オプションパーツ) ADIS16470/PCB (要オプションパーツ) | |
| 制御マイコン | Cortex M7(STM32F765) | |
| USB | USB2.0 (micro Bコネクタ) | |
| 電源 | USB供給 | |
| 動作温度範囲 | 0℃~50℃ | |
| 外形寸法 WxHxD | 80.0mm x 17.4mm x 60.0mm | |
| (参考) サンプルプログラムの データ通信周期 |
1msec (サンプルプログラムを実行した場合) | |
| 用途 | 研究・試作用。 医療・航空・宇宙用に使用しないこと。 |
|
機能ブロック図
外形図
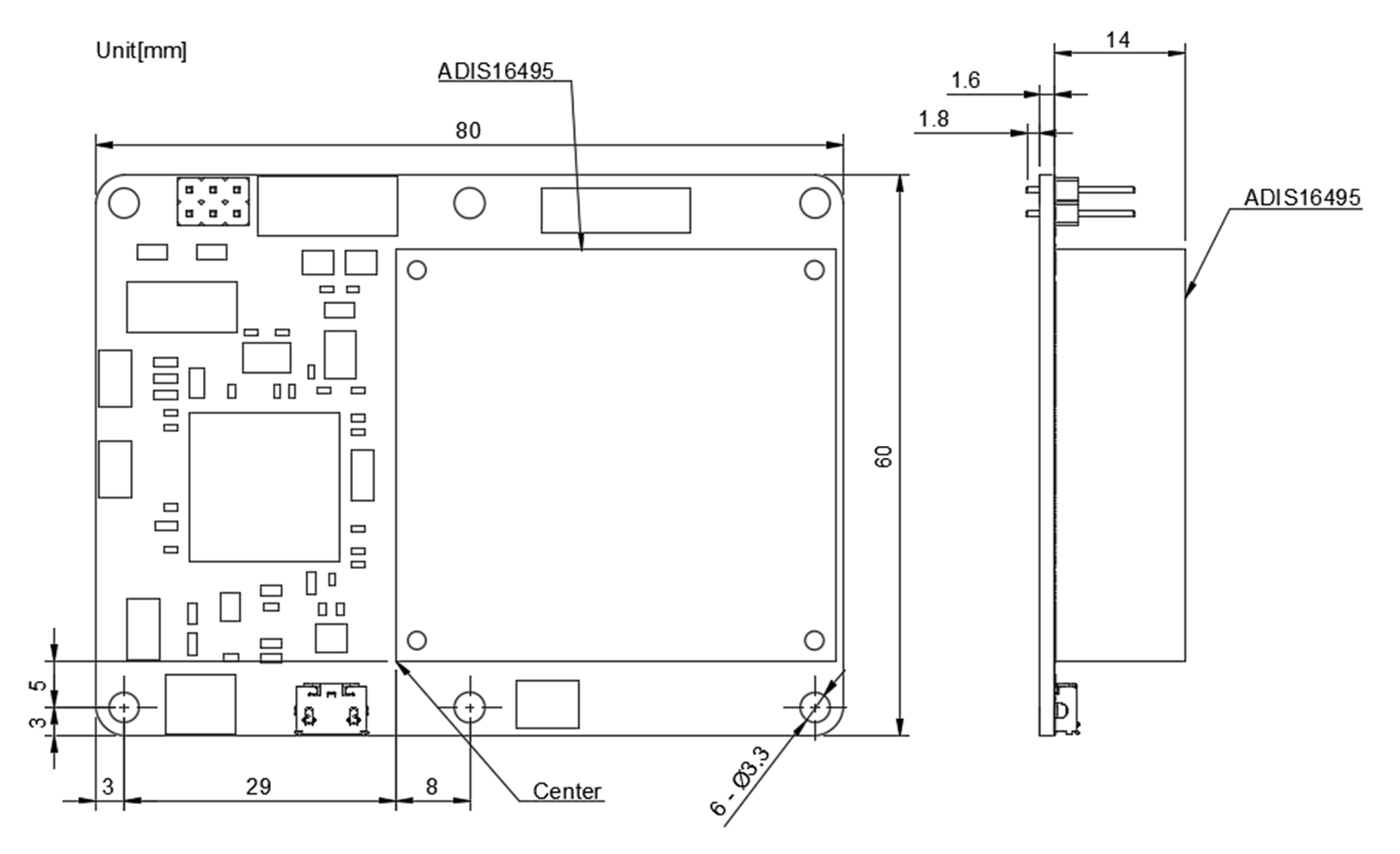
(ADIS-16495(別売)を搭載した場合)
Clickで拡大
FAQ
ADIS16470搭載IMUボーとADIS IMU Platformの違いは
前者は、高精度IMUをすぐに使用したい場合、 コンパクトなためロボットへの搭載面積が限られている場合等に向いています。
後者は、オンボード上でより高速に高精度に演算をしたい場合。より高精度なADIS-16495などを使用したい場合に向いています。IMU自体が別売りですのでご注意ください。
ファームウェアのアップデート方法を教えてください
詳細は「ファームウェアアップデートマニュアル」を参照ください。
USBケーブルから書き込む方法(DFU)または、SWD端子からSTLINK V2等を使って書き込む方法があります。後者の場合、STLINK V2等とMIPI-10変換コネクタをお客様でご用意頂く必要があります。
ヨー軸のドリフトとは?
物体の回転方向は3軸あり、ロール、ピッチ、ヨー軸と呼ばれます。定義はwikipediaを参照。
移動台車では、ロール軸とピッチ軸はそれぞれ傾き角となり、ヨー軸は旋廻軸となります。
IMUで傾き角(ロール軸、ピッチ軸)を推定する場合、静的には重力加速度から求めることができます。傾きが0であれば重力加速度も0G,傾きが90度であれば重力加速度は1Gという具合です。
一方、IMUで旋廻軸(ヨー軸)を推定する場合、重力の影響が無いため、角速度の積分に頼ることになります。積分するため、特に角速度センサは温度によって変化するオフセット的なノイズがあるため、積分するとドリフトが生じることが課題となっています。
今回使用するIMUセンサは高精度であり、またアナデバの工場出荷時に校正されているため、このドリフト量が少なく、比較的安定してヨー軸の姿勢角も推定できることが特徴です。
しかし、原理的にどうしてもドリフトが生じてしまうので、定期的(例えば10分毎)に他のセンサを用いてドリフトを補正する必要があります。
なお、地磁気を用いて補正する方法もありますが、特に屋内等では地磁気が安定しないため、どこでも使用できるわけではないのでご注意ください。
ご購入方法
当社WebShopよりご購入ください。請求書払いなどのお支払い方法や、代理店のご紹介も可能です。
ロボット開発・製品導入に関するご相談を承っております
構想段階からのご相談やお見積りのご依頼もお気軽にお問い合わせください