2025-10-27 9:00
今回はURDFファイルのロボットをIsaacLabで使用できるようにし、強化学習を実行できるようにするまでの手順を説明します。
IsaacLabはNVIDIA社が提供するロボティクスプラットフォームで、強化学習やロボット制御の研究に利用されます。また、IsaacLabの学習や評価を行うためのシミュレータは同社のIsaacSimを使用します。
URDFファイルはROSなどで使用されるロボット定義記述フォーマット(XML)です。
IsaacLabではURDFをインポートするツールが用意されていて、URDFの資産をIsaacLabで強化学習に活用することができます。
2024-08-23 14:45
ソフトウェアチームの高橋です。
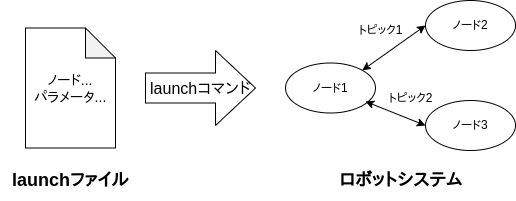
ROS 2は、ロボットシステムの開発において非常に強力なツールであり、その中でロボットシステムの起動を担うのがLaunchファイルです。
Launchファイルは、ROS 2ノードやトピック、パラメータなどの設定を記述し、複数のノードを起動し管理するための仕組みです。launchファイルからノードが起動するイメージを示します。
ROS 2では、LaunchファイルをPython、XML、YAMLの3つの形式で記述することができます。
まず、例を用いて各形式のファイルを示します。
その後にそれぞれの形式の特徴やメリット、デメリットを挙げていきます。
2021-07-14 11:00
前回の「ROS2でSLAM入門1:ROS2インストールからマップ作成編」で、ROS2のインストールから、SLAMのサンプルを動かして、地図を作成しました。
今回は、作成した地図を用いた自律移動ロボットのシミュレーションを試してみたいと思います。 前回同様、ROS2+シミュレータ(Gazebo)を使用していきます。
ロボットを好きな場所に移動させるには「SLAM」と「自律移動(ナビゲーション)」という技術が必要です。SLAMは環境内でのロボット位置姿勢を求めるもので、 自律移動は経路計算・経路追従・障害物回避などを行いながらロボットを目的地まで導く技術です。
前回作成した地図を活用して、自律移動のシミュレーションを行ってみます。
ロボット開発・製品導入に関するご相談を承っております
構想段階からのご相談やお見積りのご依頼もお気軽にお問い合わせください